Unitree R1 Basic Humanoid Robot (R1 Basic)
")
有货
- 品牌:
- UNITREE ROBOTICS
- 模型模型:
- R1 BASIC
- ORIGIN:
- 中国
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- PRE-ORDER
- SKU:
- Unitree-Robotics-R1-Basic
与优化用于家务或仓库工作的服务人形机器人不同,R1 Basic 主要被描述为一个 开发者导向平台: 一种小型、相对轻便的双足机器人,旨在实验室、初创公司和教育环境中使用,适用于需要人形外形进行步态生成、平衡控制、全身运动规划和人机交互的测试。报告的规格——例如质量约为 25 千克 和 [ "26个关节" ]—将其归类为优先考虑敏捷性和经济性而非重载能力的人形生物。
设计与特点
人形形态和移动性
R1 Basic遵循经典 双足人形布局 (躯干、两条腿和上半身结构),强调动态运动。早期媒体报道突出了涉及运动动作的演示序列(例如,像侧手翻的动作和打击手势),这些都是现代类人机器人典型的展示,因为它们对平衡、协调和执行器响应能力进行了压力测试。
轻量级构建理念
在公共描述中,R1 被框定为一个 轻量级平台 与许多旨在工业负载的全尺寸类人机器人相比,较轻的机器人通常减少了驱动器扭矩要求,可以简化跌倒管理,并且可以降低总系统成本——以牺牲提升力量和在负载下的耐力为代价。
开发者导向的可编程性
R1的覆盖率常常被描述为 可编程 并针对开发者——这意味着该平台旨在支持自定义行为、运动序列和研究工作流程(例如,针对运动或感知驱动导航的强化学习策略)。
注意: 特定的软件堆栈、SDK 细节和支持的中间件(例如,ROS/ROS 2)可能因产品代和配置而异;潜在买家通常在官方文档或报价中确认这些项目。
技术与规格
机械结构和自由度
公共报告提到R1 Basic在 大约 25 千克 与 [
"26个关节"
], 提出了一种多关节架构,能够支持全身运动和富有表现力的动作,而不仅仅是最小的双足行走。
在类人机器人中,“关节”通常指的是跨越臀部、膝盖、脚踝、躯干/腰部、肩膀、肘部,有时还包括手腕或手部机制的驱动自由度,具体取决于变体。
执行和运动控制(一般特征)
虽然详细的执行器规格并不总是在各个渠道的同一位置发布,但这一类别的人形机器人通常依赖于 电动执行器 带有集成传感(位置/速度/扭矩估计)和闭环控制以保持平衡。核心控制层通常包括:
-
状态估计 (IMU + 关节传感) 推断身体方向和稳定性
-
全身控制 协调腿部和上半身在约束下的动作
-
步态生成 用于行走、转向和恢复操作
-
跌倒检测和恢复行为 限制损害并重置姿势
感知与互动
一些报告将R1归因于 语音和图像识别 能力(通常广泛讨论为“AI特性”)。
在实践中,这些能力可以从机载感知到有线或边缘计算工作流程,具体取决于所购买的计算模块和相机/传感器包。
在Unitree的人形机器人产品线中的定位
Unitree在类人机器人(以及其他用于研究和工业试验的模型)方面的更广泛推动,常常在讨论该公司的增长和中国不断扩大的类人机器人行业时提及。
这个背景很重要,因为它影响长期支持:固件更新、备件可用性和持续的生态系统发展通常与制造商的战略优先事项相关。
应用程序和用例
机器人研究与具身人工智能
R1 Basic的最自然适配是 研究与原型制作, 包括:
-
双足运动的强化学习 (训练政策在模拟和转移到硬件)
-
全身运动规划 对于平衡、步态和干扰抑制
-
模仿学习 用于手势和动作序列
-
具身人工智能 感知影响运动决策的实验
教育和实验室指导
大学和技术项目可以使用较小的人形机器人进行教学:
-
控制理论(PID/状态空间控制)应用于不稳定系统
-
机器人运动学和动力学(多链建模)
-
传感器融合和实时系统
-
安全工程和移动机器人操作程序
演示、营销和交互原型
人形机器人通常在受控环境中用于演示、活动和早期人机交互原型,特别是在评估的目标是 公共接受度, 交互模式, 或 语音/视觉接口 而不是繁重的工作输出。
优势 / 好处
降低人形开发的成本门槛
与 R1 Basic 相关的主要好处是 价格可达性 相对于许多人形生物,其价格报告在数万美元到数十万美元之间。
一个较低的价格点可以扩大小团队的采用,并允许多机器人舰队进行研究,而不让单一昂贵的平台成为瓶颈。
轻量级平台以更安全的方式进行迭代
一个更轻的机器人可以在跌落时减少动能,并可能简化处理、运输和实验室操作——这对快速迭代运动行为的团队来说非常重要。
适合以运动为中心的实验
因为早期叙述集中于动态演示,R1 Basic 通常被讨论为一个平台用于 运动般的动作, 步态工作和全身控制实验——在这些领域,类人机器人相比于轮式机器人具有独特的价值。
FAQ部分
什么是Unitree R1基础类人机器人?
The Unitree R1 基础 是一个 可编程类人机器人 作为面向开发者、实验室和教育的低成本平台,报告约为 25 千克 与 [ "26个关节" ] 和一个低于的标题价格 US$6,000 在2025年的覆盖范围。
Unitree R1 Basic 是如何工作的?
像大多数类人型生物一样,它结合了 电动执行器, 联合传感器和带有实时控制软件的IMU,以保持平衡、生成行走动作并执行全身运动。更高级的软件可以根据配置和计算堆栈添加感知(基于摄像头)和交互功能。
为什么Unitree R1 Basic很重要?
它主要以...而著称 降低入场成本 进入类人机器人实验,使更多团队能够测试运动控制、具身人工智能和人机交互,而无需依赖更昂贵的类人平台。
Unitree R1 Basic 的好处是什么?
关键好处包括 可负担性, a 人形形态 用于研究和互动工作,以及一个 轻量级平台 适合迭代开发和运动控制实验。
摘要
The Unitree R1 基本人形机器人 被广泛讨论作为一个可访问的、以开发者为中心的人形平台,优先考虑 低成本 和 运动中心实验. 公开报告的主要规格(大约 25 千克 和 [ "26个关节" ]) 和定价接近 ["39,999元"], R1 Basic 反映了更广泛的趋势,旨在使 人形机器人和具身人工智能 更容易为研究实验室、大学和初创公司所获得——同时仍需仔细评估配置细节、软件支持和地区可用性。
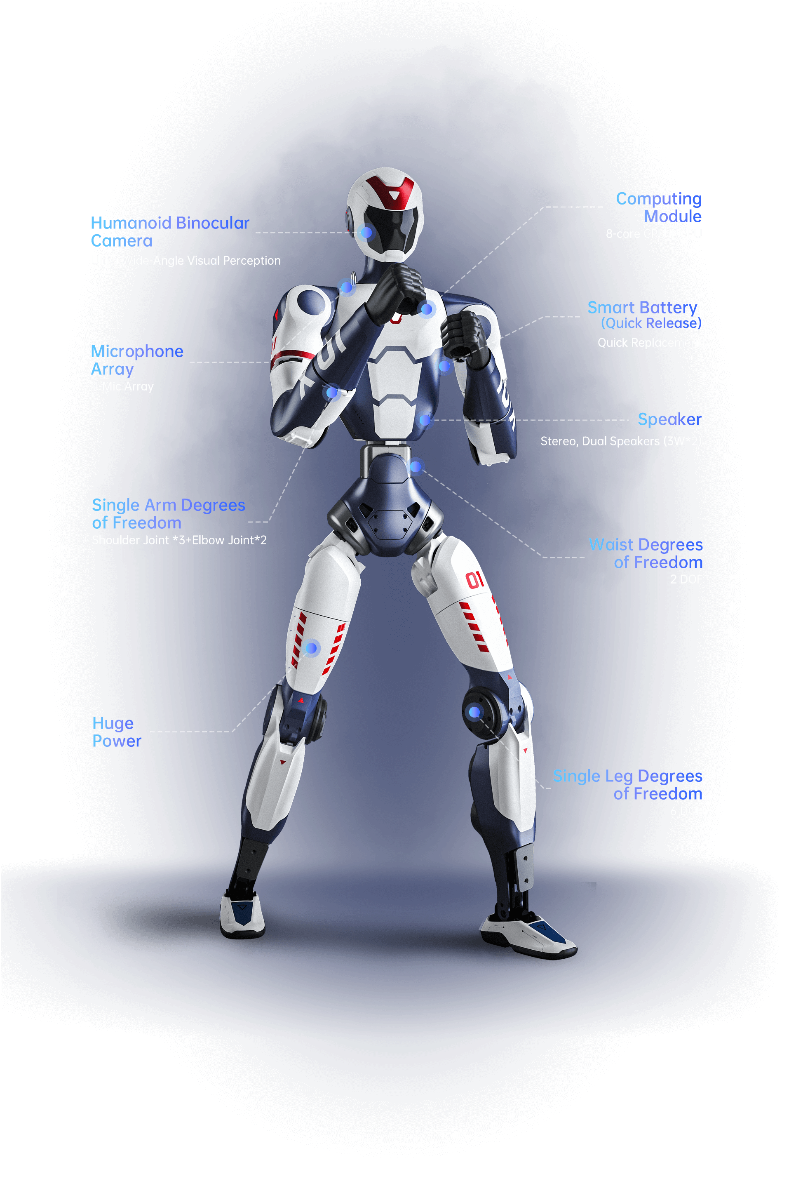
高度、宽度和厚度(支架):1210x357x190mm
电池重量:约25公斤
自由度(总关节数):24
每条腿的自由度:6
腰部的自由度:2
自由度每个臂: 5
自由度每人:无
最大单臂负载:2kg
小腿 + 大腿长度:0.675米
单臂长度:大约 0.435 米
极限关节运动范围:
腰部: Y ±150°, R ±30°
膝盖:-10° 到 +148°
臀部: Y ±157°, P -168° 到 +146°, R -60° 到 +100°
空心接头带内部电缆布线:是
联合编码器:双 + 单
冷却系统:局部空气冷却
电源:锂电池
基础计算能力:8核高性能CPU
扬声器和麦克风阵列标准
Wi-Fi 6,蓝牙 5.2:是
感知传感器:类人双目相机
充电器 (1), 智能电池 (快速释放) (1)
手持遥控器 (1)
电池寿命:大约 1 小时
智能OTA升级:支持
次级开发:否
保修:8个月
机器人配件:
1. 遥控器
2. 电池充电器
3. 机器人运输箱
默认不包括保护支架