Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- ᲑᲠᲔᲜᲓᲘ:
- UNITREE ROBOTICS
- ᲛᲝᲓᲔᲚᲘ:
- R1 BASIC
- ORIGIN:
- ჩინეთი
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
["სერვის ჰუმანოიდებისგან, რომლებიც ოპტიმიზირებულია საოჯახო საქმეებისთვის ან საწყობების სამუშაოთი, R1 Basic ძირითადად გამოირჩევა როგორც"] დეველოპერებზე ორიენტირებული პლატფორმა: პატარა, შედარებით მსუბუქი ბიპედი, რომელიც განკუთვნილია ლაბორატორიებისთვის, სტარტაპებისთვის და საგანმანათლებლო გარემოებისთვის, რომლებსაც სურთ ჰუმანოიდური ფორმის ფაქტორი სიარულის გენერაციის, ბალანსის კონტროლის, მთლიანი სხეულის მოძრაობის დაგეგმვისა და ადამიანის-რობოტის ურთიერთქმედების შესამოწმებლად. მოხსენებული სპეციფიკაციები—როგორიცაა მასა დაახლოებით 25 კგ და 26 სახსარი—დასვით იგი ჰუმანოიდების კლასში, რომლებიც პრიორიტეტს ანიჭებენ მოქნილობას და ხელმისაწვდომობას მძიმე ტვირთის ტევადობის ნაცვლად.
დიზაინი და მახასიათებლები
ჰუმანოიდური ფორმის ფაქტორი და მობილობა
R1 Basic კლასიკას მიჰყვება ბიპედალური ჰუმანოიდური განლაგება (ტორსი, ორი ფეხი და ზედა სხეულის სტრუქტურა), რომელიც ხაზს უსვამს დინამიურ მოძრაობებს. ადრეული მედია გაშუქება ხაზს უსვამდა დემონსტრაციის სექვენციებს, რომლებიც მოიცავდა სპორტულ მოძრაობებს (მაგ., კარტვიუელ-ნაირი მოძრაობები და დარტყმის ჟესტები), რაც თანამედროვე ჰუმანოიდებისთვის ტიპიური შოუებია, რადგან ისინი ხაზს უსვამენ ბალანსის, კოორდინაციის და აქტუატორის რეაგირების ტესტირებას.
მსუბუქი მშენებლობის ფილოსოფია
პუბლიკურ აღწერებში R1 ჩარჩოებშია როგორც a მარტივი პლატფორმა შედარებით მრავალი სრულმასშტაბიანი ჰუმანოიდის, რომლებიც მიზნად ისახავენ ინდუსტრიულ ტვირთებს. მსუბუქი რობოტი ზოგადად ამცირებს აქტუატორის ტორქის მოთხოვნებს, შეუძლია გაამარტივოს დაცემის მართვა და შეუძლია შეამციროს მთლიანი სისტემის ღირებულება—წონის ძალისა და დატვირთვის ქვეშ გამძლეობის ხარჯზე.
Разработчикზე ორიენტირებული პროგრამირება
R1-ის გაშუქება ხშირად აღწერს მას როგორც პრограмირებადი და მიმართული დეველოპერებისკენ—რაც ნიშნავს, რომ პლატფორმა განკუთვნილია მომხმარებლის ქცევების, მოძრაობის სექვენციების და კვლევის სამუშაო პროცესების მხარდაჭერისთვის (მაგალითად, ლოკომოტივისთვის ან აღქმის მართვის ნავიგაციისთვის გაძლიერების სწავლების პოლიტიკები).
შენიშვნა: სპეციფიური პროგრამული სტეკი, SDK დეტალები და მხარდაჭერილი მედიაპროგრამები (მაგ., ROS/ROS 2) შეიძლება განსხვავდებოდეს პროდუქტის თაობისა და კონფიგურაციის მიხედვით; პოტენციური მყიდველები ჩვეულებრივ ამ ნივთებს ადასტურებენ ოფიციალურ დოკუმენტაციაში ან ციტატებში.
ტექნოლოგია და სპეციფიკაციები
მექანიკური სტრუქტურა და თავისუფლების ხარისხები
პუბლიკური ანგარიშები ციტირებდნენ R1 Basic-ზე დაახლოებით 25 კგ with 26 სახსარი, რაც მრავალმხრივი არქიტექტურის წინადადებას წარმოადგენს, რომელიც შეუძლია მხარს უჭიროს მთელ სხეულზე მოძრაობას და გამომხატველ მოძრაობას, მხოლოდ მინიმალური ბიპედური სიარულის ნაცვლად.
In humanoid robots, “joints” generally refer to actuated degrees of freedom across hips, knees, ankles, torso/waist, shoulders, elbows, and sometimes wrists or hand mechanisms depending on variant.
აქტივაცია და მოძრაობის კონტროლი (ზოგადი მახასიათებლები)
მიუხედავად იმისა, რომ დეტალური აქტუატორის სპეციფიკაციები არ არის მუდმივად გამოქვეყნებული ერთსა და იმავე ადგილას სხვადასხვა წყაროებში, ამ კლასის ჰუმანოიდები ჩვეულებრივ ეყრდნობიან ელექტრონული აქტუატორები with integrated sensing (position/velocity/torque estimation) and closed-loop control to maintain balance. Core control layers usually include:
-
სახელმწიფო შეფასება (IMU + ერთობლივი სენსორები) სხეულის ორიენტაციისა და სტაბილურობის განსაზღვრისთვის
-
მთელი სხეულის კონტროლი კიდურების და ზედა სხეულის კოორდინირება შეზღუდვების ქვეშ
-
გადადგომის გენერაცია სეირნობის, ბრუნვის და აღდგენის მანევრები
-
ვარდნის აღმოჩენა და აღდგენის ქცევები ზიანის შეზღუდვა და პოზის აღდგენა
შეფერხება და ურთიერთქმედება
Some reports attribute the R1 with ხმოვანი და გამოსახულების ამოცნობა კომპეტენციები (ხშირად ფართოდ განიხილება როგორც “AI ფუნქციები”).
პრაქტიკაში, ეს შესაძლებლობები შეიძლება მოიცავდეს ბორტზე აღქმას, ან კავშირგაბმულ ან კიდური კომპიუტერული სამუშაო პროცესებისგან, რაც დამოკიდებულია კომპიუტერულ მოდულზე და კამერის/სენსორის პაკეტზე, რომელიც შედის კონკრეტულ შესყიდვაში.
Unitree-ის ჰუმანოიდური პორტფელის შიგნით პოზიციონირება
Unitree-ის ფართო ნაბიჯი ჰუმანოიდების მიმართულებით (სხვა მოდელებთან ერთად, რომლებიც კვლევისა და ინდუსტრიული გამოცდებისთვის არის გაწვდილი) ხშირად განიხილება კომპანიის ზრდისა და ჰუმანოიდური რობოტიკის სექტორის გაფართოების კონტექსტში ჩინეთში.
ეს კონტექსტი მნიშვნელოვანია, რადგან ის გავლენას ახდენს გრძელვადიან მხარდაჭერაზე: ფირმვერების განახლება, სათადარიგო ნაწილების ხელმისაწვდომობა და ეკოსისტემის განვითარების გაგრძელება ხშირად დაკავშირებულია მწარმოებლის სტრატეგიულ პრიორიტეტებთან.
აპლიკაციები და გამოყენების შემთხვევები
რობოტიკის კვლევა და სხეულში ინტეგრირებული ხელოვნური ინტელექტი
R1 Basic-ის ყველაზე ბუნებრივი შესაბამისობა არის კვლევა და პროტოტიპირება, მათ შორის:
-
ბიპედური ლოკომოციისთვის გაძლიერების სწავლა (ტრენინგის პოლიტიკა სიმულაციაში და გადატანა აპარატურაზე)
-
მთლიანი სხეულის მოძრაობის დაგეგმვა ბალანსისთვის, ნაბიჯებისათვის და დარღვევების უარყოფისთვის
-
იმიტაციის სწავლა გესტების და მოძრაობის სექვენციებისთვის
-
შესახებ AI გამოცდები, სადაც აღქმა მოძრაობის გადაწყვეტილებებს განსაზღვრავს
განათლება და ლაბორატორიული ინსტრუქცია
უნივერსიტეტები და ტექნიკური პროგრამები μπορούν გამოიყენონ მცირე ჰუმანოიდები სწავლებისათვის:
-
კონტროლის თეორია (PID/სახელმწიფო-ტექნოლოგიური კონტროლი) არასტაბილური სისტემების მიმართ
-
რობოტების კინემატიკა და დინამიკა (მულტილინკური მოდელირება)
-
სენსორის ფუზია და რეალური დროის სისტემები
-
უსაფრთხოების ინჟინერია და ოპერაციული პროცედურები მობილური რობოტებისთვის
დემონსტრაციები, მარკეტინგი და ურთიერთქმედების პროტოტიპები
ჰუმანოიდები ხშირად იყენებენ კონტროლირებულ გარემოში დემონსტრაციებისთვის, ღონისძიებებისთვის და ადრეული ეტაპის ადამიანის-რობოტის ურთიერთობის პროტოტიპებისთვის—特别是当目标是评估 პუბლიკური მიღება, ინტერაქციის პატერნები, ან სიტყვიერი/ხედვითი ინტერფეისები მძიმე სამუშაო შედეგის ნაცვლად.
უპირატესობები / სარგებელი
დაბალი ღირებულების შესვლა ჰუმანოიდური განვითარებისათვის
R1 Basic-ის განსაზღვრული სარგებელი არის ["ფასის ხელმისაწვდომობა"] მრავალ ჰუმანოიდთან მიმართებაში, რომლებიც ათასობით დოლარიდან ასობით ათას დოლარამდეა გაწვდილი.
მდაბალი ფასის წერტილი შეიძლება გააფართოვოს მიღება მცირე გუნდების შორის და დაუშვას მრავალროტორიანი ფლოტები კვლევისთვის, ისე რომ ერთი ძვირადღირებული პლატფორმა არ გახდეს ბოთლნეკი.
მსუბუქი პლატფორმა უსაფრთხო_iteration_ისთვის
მშვენიერი რობოტი შეუძლია შეამციროს კინეტიკური ენერგია დაცემის დროს და შეიძლება გაამარტივოს მართვა, ტრანსპორტირება და ლაბორატორიული ოპერაციები—მნიშვნელოვანია გუნდებისთვის, რომლებიც სწრაფად მუშაობენ მოძრაობის ქცევებზე.
მოძრაობაზე ორიენტირებული ექსპერიმენტებისთვის შესაფერისი
იმიტომ რომ ადრეული ნარატივები კონცენტრირდებიან დინამიურ დემონსტრაციებზე, R1 Basic ხშირად განიხილება როგორც პლატფორმა для სპორტული მსგავსი მოძრაობები, სიარული, და მთელი სხეულის კონტროლის ექსპერიმენტები—მინდვრები, სადაც ჰუმანოიდები უნიკალურად ღირებული შეიძლება იყვნენ ბორბლიანი რობოტების შედარებით.
```json [ "ხშირად დასმული კითხვები" ] ```
რა არის Unitree R1 Basic Humanoid Robot?
The Unitree R1 Basic არის a პროგრამირებადი ჰუმანოიდური რობოტი დეველოპერებისთვის, ლაბორატორიებისთვის და განათლებისთვის დაბალი ღირებულების პლატფორმად პოზიციონირებული, დაახლოებით ანგარიშვალდებული 25 კგ with 26 სახსარი და სათაურის ფასი ქვემოთ US$6,000 2025 წლის დაფარვა.
როგორ მუშაობს Unitree R1 Basic?
როგორც უმეტესობა ჰუმანოიდების, ის აერთიანებს ელექტრონული აქტუატორები, ერთობლივი სენსორები და IMU რეალურ დროში კონტროლის პროგრამული უზრუნველყოფით, რათა შეინარჩუნოს ბალანსი, შექმნას სიარულის მოძრაობები და შეასრულოს მთლიანი სხეულის მოძრაობები. უფრო მაღალი დონის პროგრამული უზრუნველყოფა შეიძლება დაამატოს აღქმა (კამერაზე დაფუძნებული) და ურთიერთქმედების ფუნქციები კონფიგურაციისა და კომპიუტერული სტეკის მიხედვით.
რატომ არის Unitree R1 Basic მნიშვნელოვანი?
ეს განსაკუთრებით გამოირჩევა კენჭისყრის ღირებულების შემცირება into humanoid robotics experimentation, enabling more teams to test locomotion control, embodied AI, and human-robot interaction without relying on far more expensive humanoid platforms.
რა არის Unitree R1 Basic-ის უპირატესობები?
მთავარი სარგებელი მოიცავს ხელმისაწვდომობა, ა ჰუმანოიდური ფორმის ფაქტორი კვლევისა და ურთიერთობის სამუშაოსთვის, და a მარტივი პლატფორმა გამოყენებული განმეორებითი განვითარების და მოძრაობის კონტროლის ექსპერიმენტებისათვის.
შედეგები
The Unitree R1 Basic ჰუმანური რობოტი გაფართოებულად განიხილება როგორც ხელმისაწვდომი, დეველოპერებზე ორიენტირებული ჰუმანური პლატფორმა, რომელიც პრიორიტეტს ანიჭებს ["დაბალი ხარჯი"] და მოძრაობაზე ორიენტირებული ექსპერიმენტირება. საჯაროდ გაწვდილი სათაურის სპეციფიკაციებით (დაახლოებით 25 კგ და 26 სახსარი) და ფასები ახლოს 39,999 იუანი[", R1 Basic ასახავს ფართო ტენდენციას"] ჰუმანოიდური რობოტიკა და სხეულით წარმოდგენილი ხელოვნური ინტელექტი მეტი ხელმისაწვდომი კვლევითი ლაბორატორიებისთვის, უნივერსიტეტებისთვის და სტარტაპებისთვის—მიუხედავად ამისა, კვლავ საჭიროებს კონფიგურაციის დეტალების, პროგრამული უზრუნველყოფის და რეგიონში ხელმისაწვდომობის ყურადღებით შეფასებას.
სიმაღლე, სიგანე და სისქე (სტანდარტი): 1210x357x190mm
[
"ბატარეით წონა: დაახლოებით 25კგ"
]
თავისუფლების ხარისხი (სრული სახსრები): 24
თავისუფლების ხარისხი თითო ფეხზე: 6
თავის წელის თავისუფლების ხარისხი: 2
თავისუფლების ხარისხი თითო ხელზე: 5
თავისუფლების ხარისხი თითო ადამიანზე: არცერთი
მაქსიმალური ერთიანი ხელის ტვირთი: 2კგ
კალფი + თეძოს სიგრძე: 0.675მ
ერთიანი ხელის სიგრძე: დაახლოებით 0.435მ
მაღალი სახსრების მოძრაობის დიაპაზონი:
[
"ბარძაყი: Y ±150°, R ±30°"
]
კოჭი: -10° დან +148°
ჰიპი: Y ±157°, P -168° დან +146°, R -60° დან +100°
Hollow Joints with Internal Cable Routing: დიახ
ჯოინტ ენკოდერები: დუალი + სინგლი
კooling სისტემა: ლოკალიზებული ჰაერის გაგრილება
ელექტროენერგიის წყარო: ლითიუმის ბატარეა
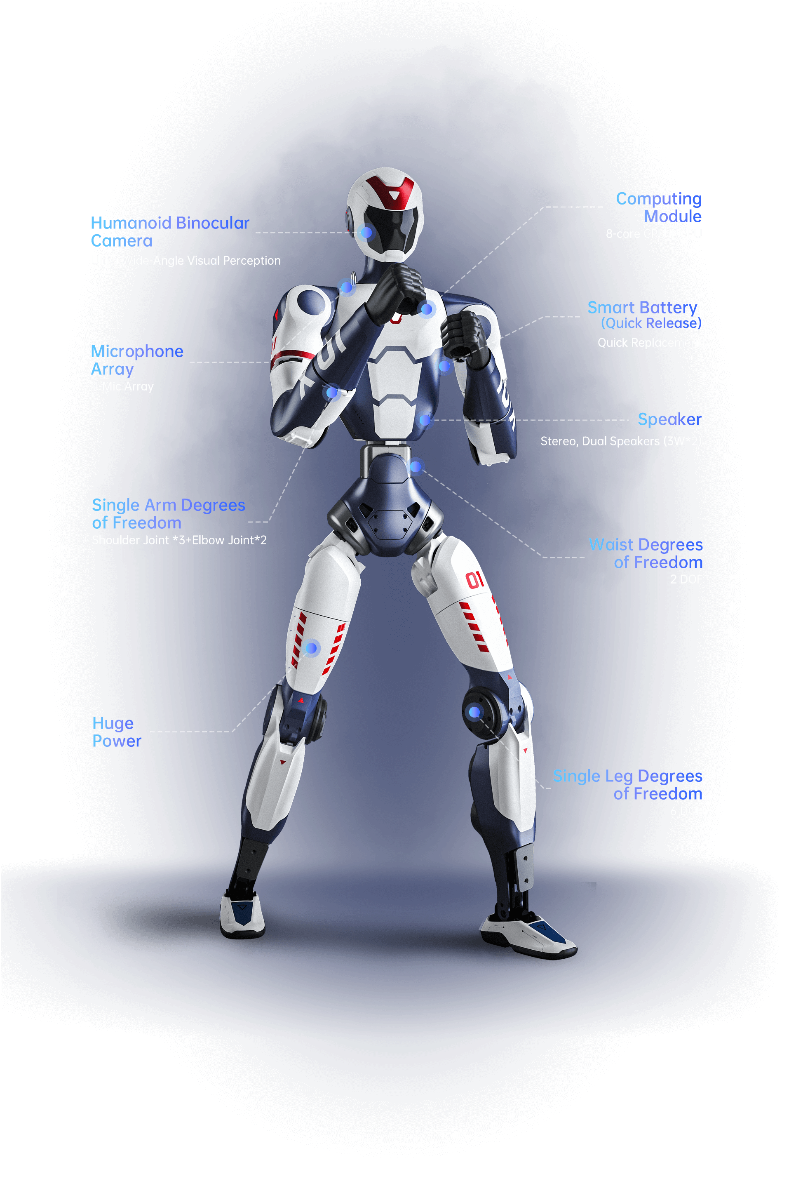
ბაზის კომპიუტერული ძალა: 8-ბირთვიანი მაღალი წარმადობის CPU
სპიკერისა და მიკროფონის არხის სტანდარტი
Wi-Fi 6, Bluetooth 5.2: დიახ
Perception Sensor: ჰუმანოიდური ბინოკლური კამერა
[
"ჩამტვირთი (1), ჭკვიანი ბატარეა (სწრაფი გათავისუფლება) (1)"
]
ხელის შორიდან მართვის პულტი (1)
ბატარეის ხანგრძლივობა: დაახლოებით 1 საათი
სმარტ OTA განახლება: მხარდაჭერილი
["მეორადი განვითარების: არა"]
გარანტია: 8 თვე
რობოტის აქსესუარები:
[
"შორიდან მართვა"
]
[
"2. ბატარეის დამტენი"
]
[
"3. რობოტის ტრანსპორტირების ყუთი"
]
დაცვითი სამაგრი არ არის ჩართული по умолчанию