Unitree R1 Basic Humanoid Robot (R1 Basic)
")
In stock
- ブランド:
- UNITREE ROBOTICS
- モデル:
- R1 BASIC
- ORIGIN:
- 中国
- Warranty:
- 8 MONTHS
- AVAILABILITY:
- USUALLY SHIPS IN 7-14 BUSINESS DAYS
- SKU:
- Unitree-Robotics-R1-Basic
他の家庭の雑用や倉庫作業に最適化されたサービスヒューマノイドとは異なり、R1 Basicは主に次のように特徴付けられています。 デベロッパー向けプラットフォーム: 小型で比較的軽量な二足歩行ロボットで、ラボ、スタートアップ、教育環境向けに設計されており、歩行生成、バランス制御、全身運動計画、人間とロボットの相互作用のテストに人間の形状を必要としています。報告された仕様—質量は約 25 kg と ["26関節"]—それを、重いペイロード容量よりも敏捷性と手頃な価格を優先するヒューマノイドのクラスに置いてください。
デザインと機能
人型フォームファクターと機動性
R1ベーシックはクラシックに従っています 二足歩行のヒューマノイドレイアウト (torso, two legs, and upper-body structure), 動的な動きを強調しています。初期のメディア報道では、バランス、協調性、アクチュエーターの応答性をストレステストするため、現代のヒューマノイドの典型的なショーケースであるアスレチックな動作(例:側転のような動きや打撃のジェスチャー)を含むデモンストレーションシーケンスが強調されました。
軽量ビルド哲学
公共の説明では、R1は次のように位置づけられています。 軽量プラットフォーム 多くの産業用ペイロードを目指すフルサイズのヒューマノイドと比較して、軽量ロボットは一般的にアクチュエータのトルク要件を減少させ、転倒管理を簡素化し、総システムコストを低下させることができますが、持ち上げる力と負荷下での耐久性を犠牲にします。
開発者向けのプログラマビリティ
R1のカバレッジは、しばしばそれを次のように説明します プログラム可能 そして、開発者を対象としており、プラットフォームはカスタム動作、動きのシーケンス、および研究ワークフローをサポートすることを目的としています(例えば、移動や知覚駆動のナビゲーションのための強化学習ポリシーなど)。
注意: 特定のソフトウェアスタック、SDKの詳細、およびサポートされているミドルウェア(例:ROS/ROS 2)は、製品の世代や構成によって異なる場合があります。見込み客は通常、これらの項目を公式文書や見積もりで確認します。
技術と仕様
機械構造と自由度
公共報告はR1 Basicを引用しました 約25kg with ["26関節"], 全身の動きや表現豊かな動きをサポートできるマルチジョイントアーキテクチャを提案しており、最小限の二足歩行だけではありません。
["人型ロボットにおいて、「関節」は一般的に、バリエーションに応じて、腰、膝、足首、胴体/ウエスト、肩、肘、時には手首や手のメカニズムにわたる駆動自由度を指します。"]
アクチュエーションとモーションコントロール(一般的な特性)
このクラスのヒューマノイドは通常、詳細なアクチュエーター仕様が一貫して同じ場所に公開されていないため、依存しています。 電動アクチュエーター 統合されたセンシング(位置/速度/トルク推定)とバランスを維持するための閉ループ制御を備えています。コア制御層には通常、次のものが含まれます:
-
状態推定 (IMU + ジョイントセンサー) を使用して体の向きと安定性を推測する
-
全身制御 脚と上半身を制約の下で調整する
-
歩行生成 歩行、旋回、回復操作用
-
転倒検出と回復行動 ダメージを制限し、姿勢をリセットする
知覚と相互作用
いくつかの報告では、R1に次のことが帰属されています。 音声および画像認識 能力(一般的に「AI機能」として広く議論される)。
実際には、これらの機能は、特定の購入に含まれるコンピューティングモジュールおよびカメラ/センサーパッケージに応じて、オンボードの認識からテザーまたはエッジコンピュートワークフローまでさまざまです。
ユニツリーのヒューマノイドポートフォリオ内での位置付け
Unitreeのヒューマノイドへの広範な推進(研究や産業試験向けに販売されている他のモデルとともに)は、同社の成長と中国における拡大するヒューマノイドロボティクスセクターの文脈で頻繁に議論されています。
この文脈は重要です。なぜなら、それが長期的なサポートに影響を与えるからです:ファームウェアの更新、スペアパーツの入手可能性、そしてエコシステムの継続的な開発は、しばしば製造業者の戦略的優先事項に結びついています。
アプリケーションとユースケース
ロボティクス研究と具現化されたAI
R1 Basicの最も自然なフィットは 研究とプロトタイピング, 含む:
-
二足歩行のための強化学習 (training policies in simulation and transferring to hardware)
-
全身運動計画 バランス、ステッピング、および干渉除去のために
-
模倣学習 ジェスチャーと動作のシーケンス用
-
具現化されたAI 実験では、知覚が動きの決定に影響を与えます
教育と実験指導
大学や技術プログラムは、小型のヒューマノイドを使って教えることができます:
-
制御理論(PID/状態空間制御)が不安定なシステムに適用される
-
ロボットの運動学と動力学(多リンクモデリング)
-
センサーフュージョンとリアルタイムシステム
-
安全工学とモバイルロボットの運用手順
デモンストレーション、マーケティング、インタラクションプロトタイプ
ヒューマノイドは、デモ、イベント、初期段階の人間-ロボットインタラクションプロトタイプのために、制御された環境でしばしば展開されます—特に評価することが目的の場合。 公開受容, インタラクションパターン、または スピーチ/ビジョンインターフェース 重い作業の出力ではなく。
利点 / ベネフィット
低コストでのヒューマノイド開発への参入
R1 Basicに関連する定義的な利点は 価格のアクセスibilitiy 多くのヒューマノイドに関しては、数万ドルから数十万ドルに報告されています。
低価格は、小規模なチームの採用を拡大し、単一の高価なプラットフォームがボトルネックになることなく、研究のためのマルチロボットフリートを可能にします。
軽量プラットフォームによる安全な反復
軽量ロボットは、落下時の運動エネルギーを減少させ、取り扱いや輸送、実験操作を簡素化する可能性があり、これは動作挙動を迅速に反復するチームにとって重要です。
動作中心の実験に適しています
なぜ初期の物語が動的なデモンストレーションに焦点を当てているかというと、R1 Basicは一般的にプラットフォームとして議論されます スポーツのような動き, 歩行作業、全身制御実験—ヒューマノイドが車輪付きロボットと比較して独自に価値を持つ分野。
```json [ "FAQセクション" ] ```
{"text":"Unitree R1ベーシックヒューマノイドロボットとは何ですか?"}
The ユニツリー R1 ベーシック はです プログラム可能なヒューマノイドロボット 低コストのプラットフォームとして開発者、ラボ、教育向けに位置付けられ、約で報告されました 25 kg with ["26関節"] そして、見出し価格は以下の通りです。 US$6,000 2025年のカバレッジ。
ユニツリー R1 ベーシックはどのように機能しますか?
ほとんどのヒューマノイドと同様に、それは組み合わせます 電動アクチュエーター, ジョイントセンサー、リアルタイム制御ソフトウェアを備えたIMUを使用してバランスを維持し、歩行動作を生成し、全身の動きを実行します。高レベルのソフトウェアは、構成やコンピュートスタックに応じて、知覚(カメラベース)やインタラクション機能を追加できます。
なぜUnitree R1 Basicは重要なのですか?
主に以下の点が注目されます エントリーコストの引き下げ 人型ロボティクスの実験において、より多くのチームが移動制御、具現化されたAI、そして人間とロボットの相互作用をテストできるようにし、はるかに高価な人型プラットフォームに依存することなく実現します。
ユニツリー R1 ベーシックの利点は何ですか?
主要な利点は次のとおりです 手頃さ, a ヒューマノイドフォームファクター 研究とインタラクション作業のために、そして 軽量プラットフォーム 反復開発およびモーションコントロール実験に適しています。
要約
The ユニツリー R1 基本ヒューマノイドロボット 広く議論されているのは、アクセスしやすく、開発者に焦点を当てたヒューマノイドプラットフォームであり、優先されるのは 低コスト と モーション中心の実験. 公に報告されたヘッドライン仕様(約 25 kg と ["26関節"]) と価格の近く 39,999元, R1 Basicは、より広範なトレンドを反映しています ヒューマノイドロボティクスと具現化されたAI より多くの研究室、大学、スタートアップにとって達成可能になりつつありますが、構成の詳細、ソフトウェアのサポート、地域ごとの利用可能性については慎重な評価が依然として必要です。
高さ、幅、厚さ(スタンド):1210x357x190mm
```json
["バッテリーを含む重量: 約25kg"]
```
自由度(全関節数):24
脚の自由度: 6
ウエストの自由度: 2
自由度(アームごと): 5
自由度(ヘッドあたり): なし
最大単腕ペイロード:2kg
カーフ + 太もも長さ: 0.675m
単腕の長さ:約0.435m
極端な関節可動域:
ウエスト: Y ±150°, R ±30°
["膝: -10°から+148°"]
ヒップ: Y ±157°, P -168°から+146°, R -60°から+100°
空洞ジョイント(内部ケーブルルーティングあり):はい
ジョイントエンコーダー:デュアル + シングル
冷却システム: 局所空気冷却
電源: リチウムバッテリー
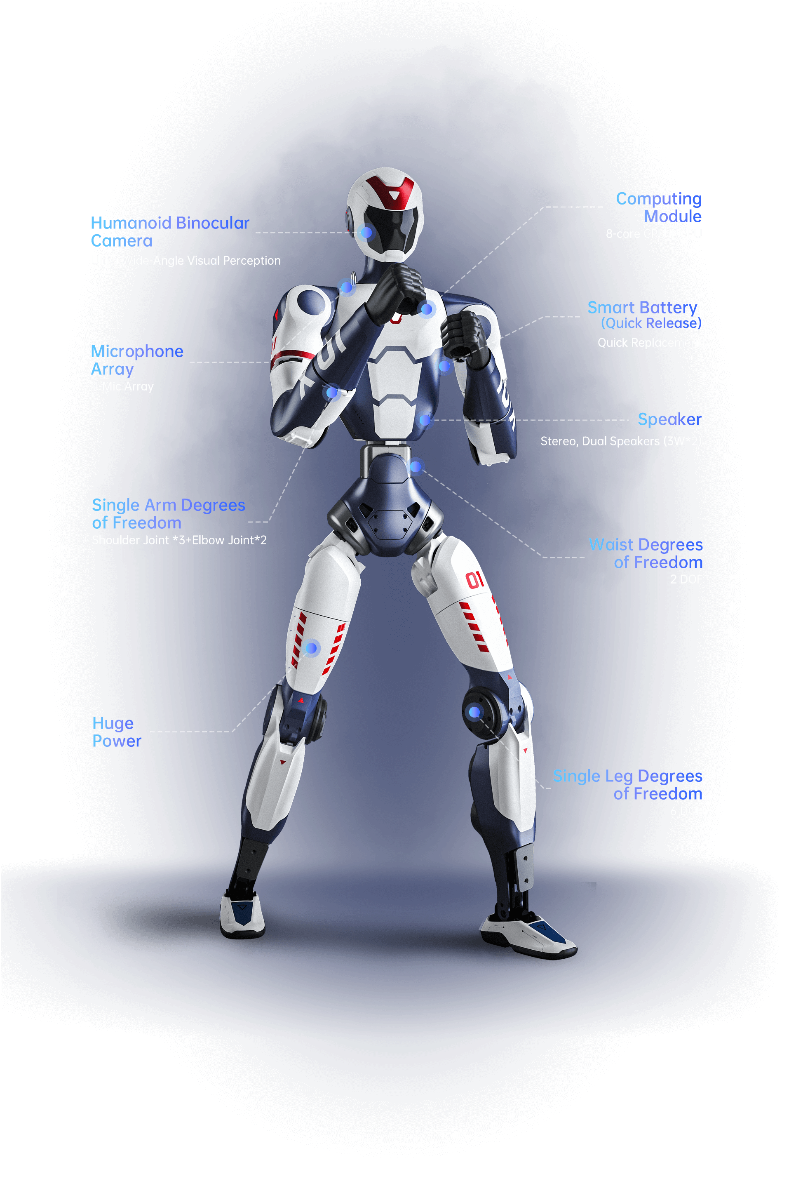
ベースコンピューティングパワー:8コア高性能CPU
スピーカーとマイクロフォンアレイ標準
["Wi-Fi 6、Bluetooth 5.2:はい"]
知覚センサー:ヒューマノイド双眼鏡カメラ
チャージャー (1)、スマートバッテリー (クイックリリース) (1)
ハンドヘルドリモコン (1)
バッテリー寿命: 約1時間
スマートOTAアップグレード:サポートされています
```json
["二次開発: いいえ"]
```
```json
["保証: 8ヶ月"]
```
ロボットアクセサリー:
1. リモコン
2. バッテリーチャージャー
3. ロボット輸送ケース
デフォルトでは保護ブラケットは含まれていません