AgiBot OmniPicker
")
In stock
- BREND:
- AGIBOT
- HISSƏ #:
- OmniPicker
- ORIGIN:
- Çin
- AVAILABILITY:
- SUBJECT TO AVAILABILITY
- SKU:
- AgiBot-OmniPicker
AgiBot OmniPicker Industrial Robot Gripper: Complete Guide
The OmniPicker family spans two confirmed generations. The original OmniPicker was introduced as an optional accessory compatible with AgiBot's X2 compact humanoid robot — described at CES 2026 as a "specialized OmniPicker adaptive gripper" that could replace the X2's standard hand for specific task configurations. The second and current generation, the OmniPicker 3, was announced at AgiBot's 2026 Partner Conference (APC 2026) on April 17 to 18, 2026, as part of the Omni 3 Series end-effector portfolio alongside the OmniHand 3 Ultra-T dexterous hand and the OmniHand 3 Lite ruggedized hand. The OmniPicker 3's three confirmed specifications from AgiBot's official announcement are: 140 Newtons of grip force, 1,000,000-cycle rated durability, and modular tactile sensing. AgiBot positions the OmniPicker 3 as the "industrial-grade" member of the Omni 3 Series portfolio, occupying the high-force high-cycle tier where the priority is sustained industrial pick-and-place throughput rather than multi-finger object manipulation.
Background and Product History
Original OmniPicker: Adaptive Gripper for X2 and Humanoid Platforms
The original OmniPicker was developed as a task-specific end-effector within AgiBot's X2 compact humanoid ecosystem. Fossbytes' CES 2026 coverage described the concept directly: "You can swap components. Imagine replacing its standard hand with AGIBOT's specialized OmniPicker adaptive gripper for a specific task." This description positions the original OmniPicker as a modular end-effector option — a gripper that could replace the humanoid hand when the application requires gripping characteristics different from those provided by the standard dexterous hand, without requiring a complete robot hardware change.
The "adaptive" designation in early OmniPicker descriptions reflects a design approach common in industrial gripper engineering: adaptive grippers use mechanical compliance or multiple contact surfaces to conform to different object shapes without requiring a change of tooling for each object type. An adaptive gripper can grip cylindrical bottles, box edges, bags, and irregular parts using the same mechanical structure, relying on compliant contact geometry to maintain hold across object diversity.
OmniPicker 3: Industrial-Grade Evolution at APC 2026
The OmniPicker 3 was announced as part of AgiBot's broader "Deployment Year One" strategy at APC 2026, where the company declared its pivot from capability demonstration to production-grade deployment. The Omni 3 Series end-effector portfolio was announced alongside four new robot platforms (the A3 humanoid, G2 Air mobile manipulator, D2 Max quadruped, and the OmniHand 3 variants), eight new foundation AI models, and the AIMA open ecosystem.
The OmniPicker 3's specifications — 140 N grip force, 1,000,000-cycle durability, and modular tactile sensing — reflect the practical requirements of production-line industrial automation at scale. These three metrics address the three primary reasons industrial grippers fail in production deployment: insufficient force for the load being handled, mechanical wear that limits the gripper's service life, and lack of contact feedback that causes undetected grip failures and downstream quality issues.
The announcement positioned the OmniPicker 3 as the force-and-endurance complement to the OmniHand 3 Ultra-T dexterous precision hand and the OmniHand 3 Lite ruggedized dexterous hand — providing a complete end-effector portfolio covering precision manipulation, ruggedized dexterous gripping, and high-force high-cycle industrial picking within a single product family.
Design and Physical Features
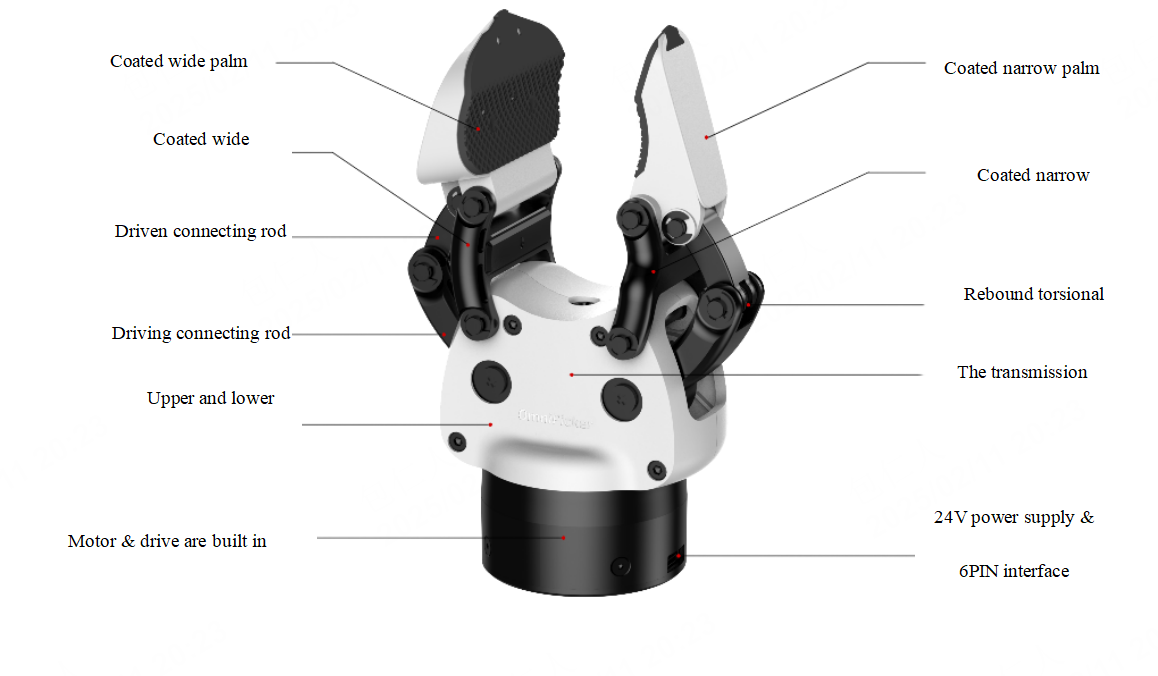
Gripper Architecture vs. Dexterous Hand Architecture
The fundamental design distinction between the OmniPicker and the OmniHand family is the trade-off between force/endurance and dexterity. Five-finger dexterous hands like the OmniHand 2025 and OmniHand Pro 2025 provide human-like manipulation across a wide range of object types and grasp configurations, but their mechanical complexity — multiple motors, tendon routings, tactile sensor arrays across 16 to 22+ degrees of freedom — creates both a practical force ceiling and a maintenance overhead that industrial high-cycle applications can make impractical.
Industrial grippers like the OmniPicker concentrate mechanical effort on the two to three contact points that matter most for holding an object securely, with simpler drive systems that can deliver higher grip forces and survive more cycles before requiring maintenance. The trade-off is a substantially narrower grasp repertoire: conventional parallel-jaw grippers can handle objects within their jaw opening range well but struggle with irregular shapes, very large or very small objects, and tasks requiring object reorientation in the hand.
The OmniPicker's "adaptive" design approach addresses this limitation by building mechanical compliance into the gripper structure — allowing the contact surfaces to conform to the specific shape of the object being grasped rather than requiring the object to fit precisely within a rigid parallel-jaw profile. This adaptation gives the OmniPicker broader object compatibility than a simple parallel gripper while maintaining the force capacity and cycle durability that dexterous hands typically cannot match.
Modular Tactile Sensing Architecture
The OmniPicker 3's modular tactile sensing is a notable design feature for an industrial gripper. In conventional industrial grippers, contact sensing is either absent (force is applied until an object is present or a position stop is reached) or implemented as a single integrated force sensor in the wrist mount rather than at the contact surfaces. The OmniPicker 3's modular tactile sensing means contact force feedback is built into the gripper's contact surfaces as replaceable modules — providing richer grip state information (where contact is occurring, how much force is applied at each contact zone) while enabling sensor replacement independently of the gripper body when tactile modules wear.
Modular tactile sensing has several practical advantages for industrial deployment. The tactile modules can be configured for different material types — high-friction pads for smooth objects, soft compliance for fragile items, standard hardness for general-purpose picking — without replacing the complete gripper assembly. When tactile modules wear from continuous operation, they can be replaced individually at lower cost than replacing the complete gripper. And the modular design ensures that the sensing interface between the gripper and the robot's control system remains standardized regardless of which tactile module configuration is installed.
Compatibility with AgiBot's Robot Family
The OmniPicker is designed for integration with AgiBot's broader robot portfolio. The original OmniPicker was specifically described as compatible with the X2 compact humanoid's wrist interface. The OmniPicker 3, as part of the Omni 3 Series announced alongside the updated G2 and G2 Air industrial platforms, is expected to be compatible with the wrist interfaces of AgiBot's G2, G2 Air, and humanoid robot arms.
The modular end-effector strategy — standard wrist interface allowing OmniPicker, OmniHand 2025, OmniHand Pro 2025, OmniHand 3 Ultra-T, or OmniHand 3 Lite to be mounted interchangeably — is central to AgiBot's product value proposition for industrial customers who need to configure different end-effectors for different tasks within the same robot fleet without purchasing separate robot arms for each task type.
Technology and Specifications
Confirmed OmniPicker 3 Specifications
| Specification | Value |
|---|---|
| Grip Force | 140 N |
| Rated Cycle Durability | 1,000,000 cycles |
| Tactile Sensing | Modular tactile sensing |
| Classification | Industrial-grade gripper |
| Announcement Date | April 17 to 18, 2026 (APC 2026) |
| Product Family | Omni 3 Series |
| Companion Products | OmniHand 3 Ultra-T, OmniHand 3 Lite |
140-Newton Grip Force: Industrial Significance
The OmniPicker 3's 140-Newton grip force places it in a meaningful performance tier for industrial pick-and-place applications. To contextualize 140 N: this represents approximately 14.3 kilograms of grip force — sufficient to securely hold and move objects significantly heavier than what standard humanoid dexterous hands are designed for. The OmniHand Pro 2025's aggregate power-grasp force is listed at 35 to 60 Newtons sustained; the OmniPicker 3's 140 N is approximately 2.3 to 4 times higher.
This force level covers a wide range of standard industrial pick-and-place applications: standard unit-load packaging (cartons up to 10 to 15 kilograms within the arm's payload), automotive subassemblies, electronic components requiring secure holding during transport between workstations, and logistics parcels across the full range of standard parcel sizes and weights. For comparison, typical collaborative robot grippers in the 140-160 N grip force range (such as the Robotiq 2F-140) are among the most widely deployed industrial gripper platforms globally, validating the OmniPicker 3's force specification as commercially proven territory.
1,000,000-Cycle Durability: Production-Line Economics
The 1,000,000-cycle rated durability of the OmniPicker 3 is arguably its most commercially significant specification for industrial buyers. In production-line automation economics, gripper replacement cost is one of the primary operational expenses after the initial robot investment. A gripper that requires replacement after 100,000 cycles — a common failure mode for lower-end industrial grippers — creates a replacement schedule of approximately every 1 to 2 months on a high-throughput line operating at 1 to 2 grasps per second.
At 1,000,000 cycles, the OmniPicker 3's rated durability extends the replacement interval by a factor of 10 — stretching a theoretical replacement from every 1 to 2 months to every 10 to 20 months at the same throughput rate. This extended service life reduces both the replacement material cost and the maintenance labor and downtime costs associated with scheduled gripper replacement on production lines.
At AgiBot's verified production throughput benchmark for the G2 robot at Longcheer Technology (310 units per hour, approximately one operation per 19 seconds), 1,000,000 cycles represents approximately 19,000,000 seconds of operation — roughly 5,278 hours or 220 continuous days. In realistic single-shift production (8 hours/day), this represents approximately 660 days of production before reaching the rated cycle count.
Modular Tactile Sensing for Contact-Aware Industrial Gripping
The modular tactile sensing system allows the OmniPicker 3 to operate in what gripper researchers call "contact-aware" mode — the gripper's controller receives real-time information about grip force distribution across its contact surfaces, enabling it to detect grip failures (insufficient contact force, part slip, or part absence from expected position) before they result in downstream quality issues or dropped parts.
This contact-awareness is especially valuable in high-speed production contexts where visual confirmation of each individual grasp is not practical and the cycle time is too short for external vision systems to validate every pick. The tactile feedback enables the gripper's control system to confirm successful grasp acquisition and release within each cycle, flagging anomalies for inspection or operator alert without interrupting the line for false positives.
Applications and Use Cases
High-Throughput Logistics Pick-and-Place
Logistics and e-commerce fulfillment involve extremely high daily cycle counts — order picking operations at large distribution centers can require a single arm system to execute thousands of grasps per shift across a diverse inventory of box sizes, bag types, and packaged goods. The OmniPicker 3's 1,000,000-cycle rated durability directly addresses the longevity requirement of these applications, while the 140 N grip force covers the full weight range of standard parcel sizes. The modular tactile sensing supports the mixed-object picking scenarios where grip confirmation is needed for objects that do not present consistent grasp contact profiles.
Automotive Manufacturing Loading and Unloading
Automotive manufacturing involves both high production volumes and the handling of heavy metal subassemblies, fasteners, and finished components. Machine loading and unloading operations — extracting machined parts from CNC machining centers, placing blanks into stamping dies, transferring subassemblies between workstations — require grip forces in the range provided by the OmniPicker 3, combined with the cycle durability to sustain these operations across multi-shift production schedules without frequent replacement.
Battery Manufacturing Material Handling
AgiBot's strategic partnership with CATL — the world's largest battery manufacturer — provides a directly relevant deployment context for the OmniPicker 3. Battery cell and module handling on production lines requires controlled grip force to avoid damaging sensitive electrochemical components while maintaining secure hold during transport between processing stages. The OmniPicker 3's modular tactile sensing enables the grip force control precision needed for these sensitive handling tasks, while the high cycle rating supports the continuous production volumes of battery manufacturing.
Electronics Assembly and Component Transport
Electronic component handling — printed circuit boards, assembled modules, electronic sub-assemblies — requires a combination of secure grip (to prevent drops during transport) and force control (to avoid mechanical damage to sensitive components). The modular tactile sensing of the OmniPicker 3 provides the contact force feedback needed for force-controlled component handling, and the grip force range covers the weight spectrum from individual components through completed board assemblies and packaged electronic products.
Humanoid Robot Task Switching
The OmniPicker's design as a modular end-effector interchangeable with AgiBot's OmniHand variants enables humanoid robots to switch between task configurations by swapping end-effectors. A robot arm configured with an OmniHand 3 Ultra-T for precision assembly tasks in the morning can have its end-effector swapped to an OmniPicker 3 for high-force material handling tasks in the afternoon — adapting the same robot arm to different task requirements within a single facility without requiring duplicate robot investments for each task type.
Advantages and Benefits
140 N Grip Force for Heavy Industrial Material Handling: The 140 N grip force enables the OmniPicker 3 to handle the weight range of standard industrial unit loads — heavy cartons, automotive subassemblies, battery modules — that exceeds the sustained grip force capacity of five-finger dexterous hands.
1,000,000-Cycle Durability for Production Economics: The million-cycle rating substantially extends the replacement interval compared to conventional industrial grippers, reducing replacement material costs and maintenance downtime in high-throughput production environments.
Modular Tactile Sensing for Contact-Aware Quality Control: The tactile sensing system provides real-time grip confirmation within each cycle, enabling autonomous detection of grip failures and force limit exceedances without external vision system validation of each individual grasp.
Omni 3 Series Integration for Mixed-Fleet Deployment: As part of the Omni 3 Series alongside the OmniHand 3 Ultra-T and OmniHand 3 Lite, the OmniPicker 3 participates in a complete end-effector portfolio with consistent robot wrist compatibility, enabling mixed end-effector configurations across a single robot fleet.
Modular Tactile Sensor Replacement: The modular design of the tactile sensing components enables individual sensor module replacement rather than complete gripper assembly replacement when sensing surfaces wear, reducing maintenance cost and extending the effective service life of the complete gripper system.
Comparison: OmniPicker 3 vs. OmniHand 3 Ultra-T vs. OmniHand 3 Lite
| Feature | OmniPicker 3 | OmniHand 3 Ultra-T | OmniHand 3 Lite |
|---|---|---|---|
| Grip Force | 140 N | 10:1 load-to-weight ratio (precision) | Not yet published |
| Cycle Durability | 1,000,000 cycles | Not specified | Not yet published |
| Tactile Sensing | Modular tactile | Full-hand 3D tactile + palm camera | Not yet published |
| Degrees of Freedom | Gripper (not dexterous hand) | 22+3 DOF | Not yet published |
| Weight | Not yet published | 500 g | Not yet published |
| Primary Use | High-force repetitive picking | Precision dexterous manipulation | High-impact ruggedized deployment |
| Response Time | Not specified | Sub-0.3 s | Not specified |
Frequently Asked Questions (FAQ)
What is the AgiBot OmniPicker? The AgiBot OmniPicker is a family of industrial robot grippers from AgiBot, designed for high-force, high-cycle-life picking applications on humanoid robots and collaborative robot arms. The latest version, the OmniPicker 3, was announced at APC 2026 on April 17 to 18, 2026 as part of AgiBot's Omni 3 Series end-effector portfolio. It provides 140 Newtons of grip force, a rated durability of 1,000,000 cycles, and modular tactile sensing for contact-aware industrial gripping. It is the high-force complement to the OmniHand 3 Ultra-T precision dexterous hand and the OmniHand 3 Lite ruggedized hand within the same product family.
How does the AgiBot OmniPicker work? The OmniPicker operates as an adaptive gripper end-effector mounted to a robot arm wrist interface. Its compliant contact geometry allows it to conform to the shape of different objects — boxes, bags, cylindrical components, irregular parts — without requiring a tooling change for each object type. The modular tactile sensing system provides real-time contact force feedback at the grip surfaces, enabling the robot controller to confirm successful grasp acquisition, detect part slip before it causes a drop, and verify part absence when a pick attempt misses. The 140 N grip force provides secure holding across the weight range of standard industrial unit loads.
What is the AgiBot OmniPicker 3's grip force, and why does it matter? The OmniPicker 3 provides 140 Newtons of grip force — approximately 14.3 kilograms of gripping force. This specification matters because it determines the maximum object weight the gripper can securely hold during transport and manipulation. At 140 N, the OmniPicker 3 covers the full weight range of standard logistics parcels, automotive subassemblies, battery modules, and electronic assemblies encountered in industrial pick-and-place applications. This is approximately 2.3 to 4 times higher than the sustained grip force of AgiBot's five-finger dexterous OmniHand variants.
How does the OmniPicker 3 compare to the OmniHand 2025 family? The OmniPicker 3 and OmniHand 2025 family address different points on the force-vs-dexterity spectrum. The OmniHand 2025 provides 16 degrees of freedom at 5 N fingertip force for interactive service and research manipulation; the OmniHand Pro 2025 provides 19 degrees of freedom at 35 to 60 N aggregate power-grasp force for industrial and precision research tasks. The OmniPicker 3 provides 140 N grip force with 1,000,000-cycle durability for high-force, high-throughput industrial picking — a specification tier that prioritizes force capacity and cycle life over the multi-finger dexterity and object handling diversity that the OmniHand variants provide.
Summary
The AgiBot OmniPicker represents the industrial high-force gripping tier of AgiBot's end-effector portfolio, completing a product family that spans from precision research dexterity (OmniHand 3 Ultra-T) through ruggedized industrial manipulation (OmniHand 3 Lite) to the high-force high-cycle picking applications that define the bulk of industrial production automation workloads. The OmniPicker 3's 140-Newton grip force, 1,000,000-cycle rated durability, and modular tactile sensing collectively address the three primary requirements of production-grade industrial gripping: sufficient force for the load being handled, sufficient mechanical life for sustained production economics, and sufficient contact intelligence for autonomous grip confirmation and quality assurance. Announced at APC 2026 as part of AgiBot's "Deployment Year One" strategy — declared at the point when the company had already shipped 10,000 robots and was scaling industrial deployments at CATL, Longcheer Technology, and major automotive manufacturers — the OmniPicker 3 is positioned as a production-ready industrial end-effector designed to grow with AgiBot's expanding industrial robot fleet.
Specifications
| HISSƏ # | OmniPicker |
|---|---|
| BREND | AGIBOT |
What's included
Related Products

Out of stock